The need for parking spaces will continue to increase in the future. Studies show that finding a free parking space causes 30% of inner-city traffic. The efficient management of parking spaces has long been a central point in the planning of urban and regional infrastructures. The overall student project Parking in Smart Cities is split into 5 sub-projects and aims to improve parking management in smart cities.
The project Park&Charge 1 is one of two sub-projects that addresses the use case of parking at charging stations for electric vehicles. How do you find a free charging station for your electric vehicle? How to prevent excessive parking on such parking spaces while not charging? Different aspects of that use case are examined and prototypically implemented.
Teammitglieder:
Nikolai Johannes Kulczak, Shambhavi Shukla, Tobias Archut
The need for parking spaces will continue to increase in the future. Studies show that finding a free parking space causes 30% of inner-city traffic. The efficient management of parking spaces has long been a central point in the planning of urban and regional infrastructures. The overall student project Parking in Smart Cities is split into 5 sub-projects and aims to improve parking management in smart cities.
The project Park&Charge 2 is one of two sub-projects that addresses the use case of parking at charging stations for electric vehicles. How do you find a free charging station for your electric vehicle? How to prevent excessive parking on such parking spaces while not charging? Different aspects of that use case are examined and prototypically implemented.
The need for parking spaces will continue to increase in the future. Studies show that finding a free parking space causes 30% of inner-city traffic. The efficient management of parking spaces has long been a central point in the planning of urban and regional infrastructures. The overall student project Parking in Smart Cities is split into 5 sub-projects and aims to improve parking management in smart cities.
The project Park&Reside 1 is one of two sub-projects that addresses the use case of parking at residential units. How to monitor parking spaces assigned to residential units? How do you know whether a vehicle parking there belongs to a resident and is legally parking there? Is it possible to offer those parking spaces for dynamic parking management to non-residents? Different aspects of that use case are examined and prototypically implemented.
Teammitglieder:
Abdullah Al Mosabbir, Lubna Tasneem, Moktahid Al Faisal, Sunaish Kumar
The need for parking spaces will continue to increase in the future. Studies show that finding a free parking space causes 30% of inner-city traffic. The efficient management of parking spaces has long been a central point in the planning of urban and regional infrastructures. The overall student project Parking in Smart Cities is split into 5 sub-projects and aims to improve parking management in smart cities.
The project Park&Reside 2 is one of two sub-projects that addresses the use case of parking at residential units. How to monitor parking spaces assigned to residential units? How do you know whether a vehicle parking there belongs to a resident and is legally parking there? Is it possible to offer those parking spaces for dynamic parking management to non-residents? Different aspects of that use case are examined and prototypically implemented.
Teammitglieder:
Adnan Razzaq, Muhammad Salik Mansoor, Shayan Arif Butt, Shehryar Iqbal
The need for parking spaces will continue to increase in the future. Studies show that finding a free parking space causes 30% of inner-city traffic. The efficient management of parking spaces has long been a central point in the planning of urban and regional infrastructures. The overall student project Parking in Smart Cities is split into 5 sub-projects and aims to improve parking management in smart cities.
One approach of enabling smart parking technologies is the integration of parking space sensors on the ground. The existing sensor installation at the parking lot P+R Bahnhof/Brennerstraße in Bamberg is used to perform tests on the sensor system. Is the occupancy detection working correctly? What is the accuracy of the detection? The sub-project Sensor Testing addresses the use case of parking space sensor testing. The sensor data is compared to a ground truth data set and different environmental influences are examined.
Smart Dosing 4.0 – Mobile Datacase Hochschule Landshut ViscoTec Projekt Pitch
Beschreibung
„Smart Dosing 4.0 – Mobile Datacase“ ist ein Projekt in Kooperation mit der Firma ViscoTec GmbH. Hierbei handelt es sich um eine mobile Messstation, die für Verschleißerkennung und Wartungsarbeiten an Dosierpumpenanlagen eingesetzt wird. Das Auslesen der Daten wird im Industriestandardverfahren durchgeführt. Es lassen sich Kosten minimieren, indem ungeplante Stillstandszeiten von Anlagen vermieden werden. Die optimale Planung bei Produktionsstätten wird dadurch ermöglicht. Zusätzlich lassen sich die Daten über eine App grafisch auslesen und visualisieren.
concept of optical character recognition software, pile of paper documents being turned into digital data (laptop with progress bar) vector illustration on mesh background
Problemstellung
Carviso benötigt für das Erstellen von Gutachten bei einem KFZ die Daten aus einem Fahrzeugschein. Derzeit werden die Daten manuell von einem Gutachter erfasst und anschließend mühselig mit der Hand in eine entsprechende Software eingetippt.
Produktvision
Carveasy ist eine Software, die Fotos von Fahrzeugscheinen entgegennimmt und darin Daten automatisiert erkennt. Die Daten aus dem Fahrzeugschein werden anschließend mit einer Genauigkeitsangabe zurückgeliefert. Zentral in dem Projekt ist ein universell verwendbares Backend mit REST API.
Projektziele
Erstellung eines Backends mit REST API, welches das Auslesen der Daten auf einem Fahrzeugschein erlaubt
Einfache Anwendung durch Spezialisierung auf Fahrzeugschein
Nachvalidierung der ausgelesenen Daten
Vorverarbeitung und Validierung der Daten
Berechnung der Gesamtwahrscheinlichkeit der ausgelesenen Daten
Die API ist über einen Azure App Service erreichbar. Es gibt eine Swagger Oberfläche, welche es ermöglicht diese zu testen. Das eingegebene Bild wird von dem Microsoft Form Recognizer ausgewertet, das Ergebnis wird von der API validiert und zurückgegeben.
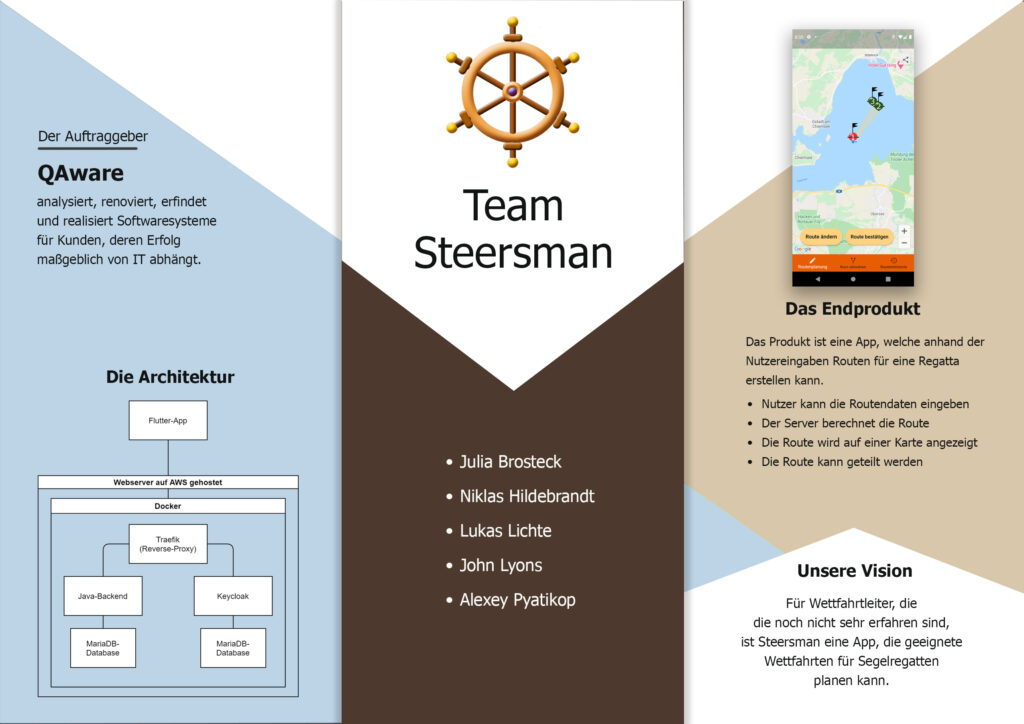
Im Segelsport nennt man einen sportlichen Vergleich auf dem Wasser eine Regatta. Eine Regatta besteht aus mehreren Wettfahren, die eine Wettfahrtleitung auf dem Wasser organsiert. Es finden sich aufgrund von mangelnder Erfahrung jedoch kaum Personen, die Teil der Wettfahrtleitung sein wollen.
Vision
Stellt euch vor, es ist ein Weltmeisterschaftsfinale und kein Schiedsrichterteam ist da. Im Profisport nicht denkbar – im Breitensport schon eher möglich.
Steerman ist ein System, das die Wettfahrtleitung beim Legen eines Kurses einer Wettfahrt unterstützt, um damit den Breitensport Segeln zu stärken.
Ergebnisse
In Kooperation mit der QAware und dem Chiemsee Yachtclub Prien wurde eine mobile Applikation entwickelt mit dem Ziel, unerfahrene Wettfahrtleiter bei der Planung einer Wettfahrt zu unterstützen. Dabei soll fehlende Erfahrung bei der Planung einer Wettfahrt ausgeglichen werden, indem die Applikation einen Kurs vorschlägt, der auf gegebenen Parametern wie etwa den Wind- und Schiffsdaten basiert.
Routenplanung für unerfahrene Wettfahrtleiter erleichtert
Wettfahrtleiter kann anhand bestimmter Parameter (wie z.B. Standort/Wind/Bootsklasse) einen Routenvorschlag bekommen
Er kann die Route speichern und bewerten
Unterstützung und Teilen der Route für die Bojenplatzierer
Trial of Two wird derzeit von vier Studierenden der Computerspielwissenschaften an der Universität Bayreuth entwickelt. Es ist ein kooperatives Beat `em up für 2 Spieler*innen. Das Kampfsystem ist physikbasiert und angelehnt an Martial Arts. Die Kämpfe finden in einem prozedural generierten Dungeon, auch bekannt als das Dojo, statt. Ein Ort, der erschaffen wurde um die stärksten, schnellsten und diszipliniertesten Haudegen der Welt zu finden und zugleich ein Ort um ein starkes Band von Freundschaft und Vertrauen zwischen all jenen zu formen, die sich trauen das Dojo gemeinsam zu betreten.
Für Außenstehende scheint das Dojo eine Kampfarena zu sein; und das ist richtig. Aber es ist mehr als das: Es ist ein Spiel. Wer immer das Dojo betritt akzeptiert seine Regeln: 1. Ihr lebt und sterbt gemeinsam 2. Das Dojo ist für jeden anders 3. Eure Waffe ist Squash Seid gewarnt: Wenn ihr es nicht schafft euch gegenseitig am Leben zu halten, seid ihr und das Dojo für immer verloren.
Im Bereich der Mensch-Roboter-Interaktion gibt es noch viele Hürden zu meistern. Unser Projekt erleichtert diese Interaktion unter Verwendung neuester Technik. Beim Arbeiten mit dem Roboter kann sich der Anwender verschiedene Informationen direkt auf einer HoloLens anzeigen lassen. So können wichtige Sensordaten oder Fehlerzustände schnell und übersichtlich ausgelesen werden.
Auch für eine Produktivumgebung – beispielsweise in einer Industrieanlage – können mit der Brille sicherheitsrelevante Daten über den Arbeitsraum visualisiert oder Informationen zur Umwelt geliefert werden. Dabei kann jeder Benutzer aus verschiedenen Detaillierungsgraden auswählen, seine Darstellung individuell anpassen und diese abspeichern.
Der Fokus des Projekts liegt dabei auf der einfachen Erweiterbarkeit, weshalb das System in einzelne, eigenständig ausführbare Programmbestandteile, sog. Widgets aufgeteilt wurde. Neben den bereits entwickelten Widgets ist es durch das von uns implementierte Widget-Framework möglich, dem System weitere, auch komplexere Widgets hinzuzufügen. Die Grenzen hierbei sind nur die Daten und Interaktionsmöglichkeiten, die die Schnittstelle mit dem Roboter zur Verfügung stellt.
Bedienung
Bei einer HoloLens ist es üblich, die Anwendung mithilfe von Gesten zu steuern.
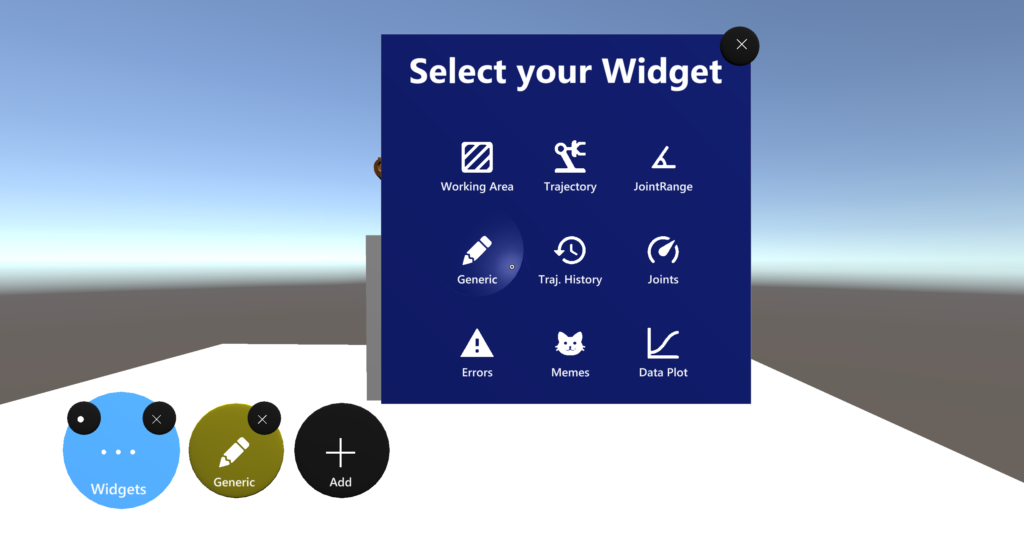
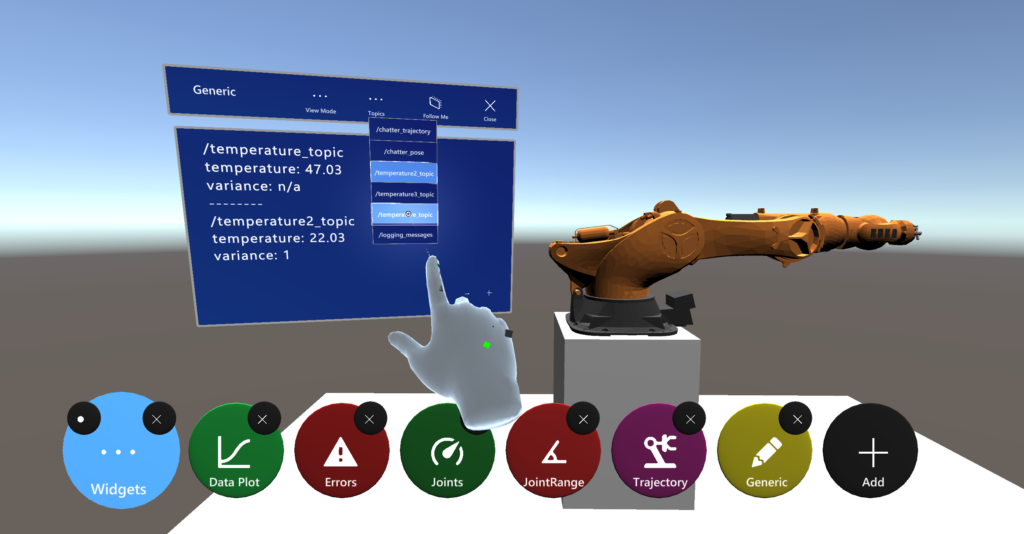
Eine Berührung des “Widgets”-Buttons öffnet eine Leiste, über die einzelne Widgets geöffnet, geschlossen oder neue Widgets hinzugefügt werden können. Letzteres wird mithilfe des “Add”-Buttons und einem Auswahlmenü realisiert.
Ein einzelnes Widget kann hierbei mehrmals ausgewählt werden, um beispielsweise im Generic Text Widget verschiedene Informationen parallel anzusehen.
Die ausgewählten Widgets können einzeln oder auch alle gemeinsam minimiert oder geschlossen werden. Die Leiste kann außerdem eingeklappt werden, wenn sie nicht benötigt wird.
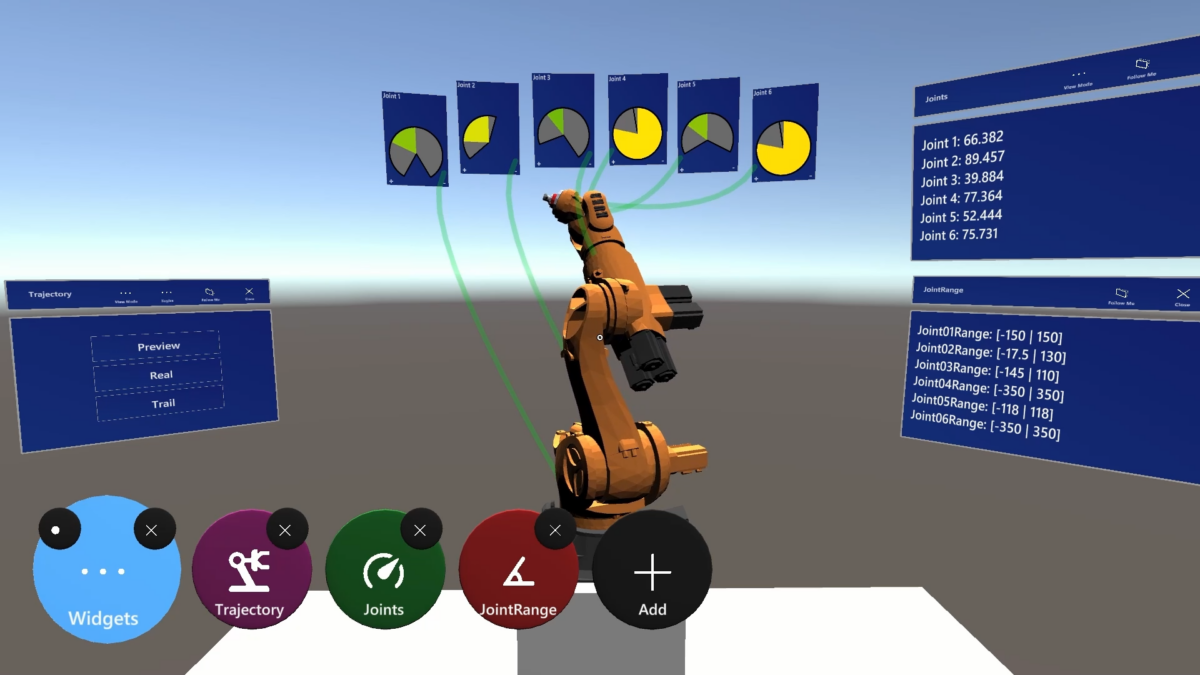
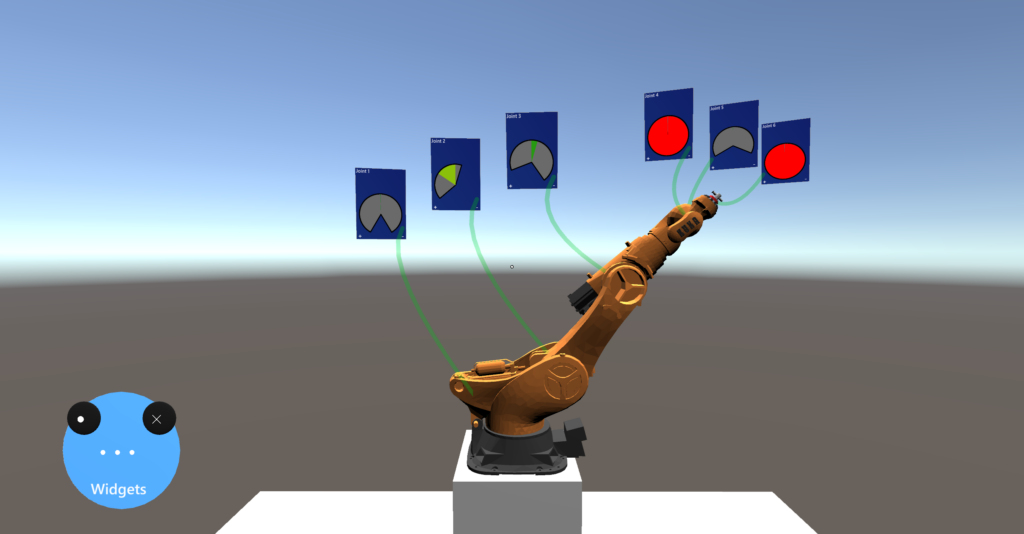
Die aktiven Widgets lassen sich mit Hilfe von Gesten beliebig im Raum positionieren. Widgets, die sich auf eine bestimmte Stelle des Roboters beziehen – wie das Joint Range Widget – sind durch Linien mit diesen Stellen verbunden, so dass die angezeigten Informationen auch nach einer Umplatzierung weiterhin zugeordnet werden können.
Implementierte Widgets
Auf Basis des Widget-Frameworks wurden mehrere Widgets implementiert. Dabei werden aktuelle Informationen aus dem Robot Operating System (ROS), einem Framework für persönliche Roboter und Industrieroboter, ausgelesen und entweder direkt am Roboter oder auf einem Fenster auf der HoloLens virtuell dargestellt.
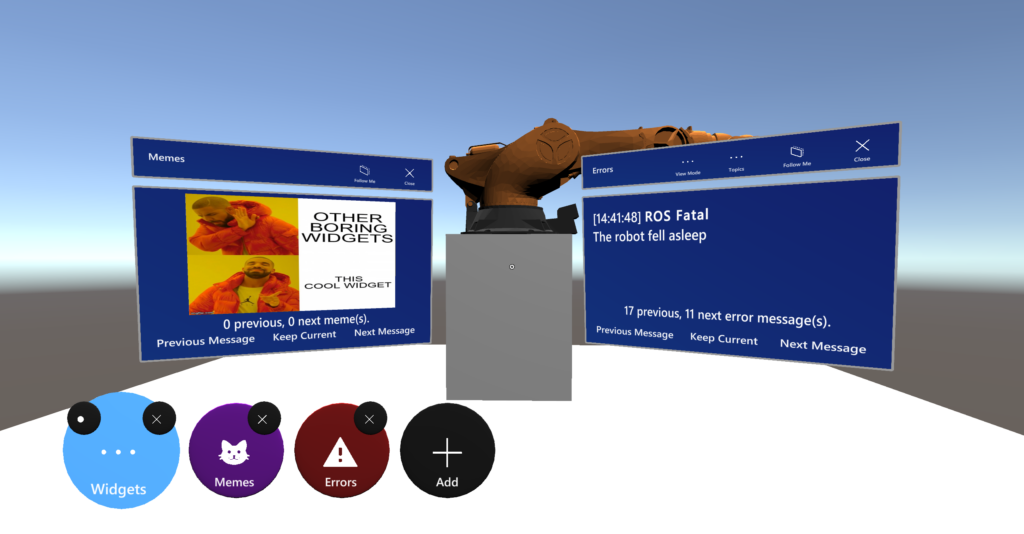
Das Service Widget kann dazu verwendet werden, alle implementierten ROS-Services aufzurufen. Falls ROS oder die Widgets Fehler aufwerfen, werden diese automatisch vom Error Widget aufgefangen und gespeichert. Bei einem Klick auf das entsprechende Icon werden die Meldungen dann dem Nutzer präsentiert. Ähnlich funktioniert auch das Meme Widget, welches Meldungen der anderen Widgets in Meme-Form präsentiert – für ein wenig mehr Spaß am Arbeitsplatz. 🙂
Um beliebige Informationen als reinen Text wiederzugeben, kann ein Generic Text Widget angezeigt werden. Nach der Auswahl der Topics werden diese dann stichpunktartig auf der Widget-Instanz aufgelistet. Um Zahlenwerte anzuzeigen, kann zudem auf das Data Plot Widget zurückgegriffen werden, bei dem ein zeitlicher Verlauf als Graph angezeigt wird.
Falls in der Szene ein Roboter vollständig konfiguriert wurde, können auch Widgets direkt auf den Roboter projiziert und Befehle aus ROS-Topics auf den virtuellen Roboter angewandt werden. Dazu sind zunächst das Joint Overview Widget und das Joint Range Widget zu nennen, welche die maximalen und aktuellen Winkel der Gelenke und die Nähe zu den Grenzwerten visuell aufzeigen. Ein vereinfachter Arbeitsraum kann mit dem Working Area Widget dargestellt werden, welches seine Farbe je nach Abstand zum Nutzer anpasst.
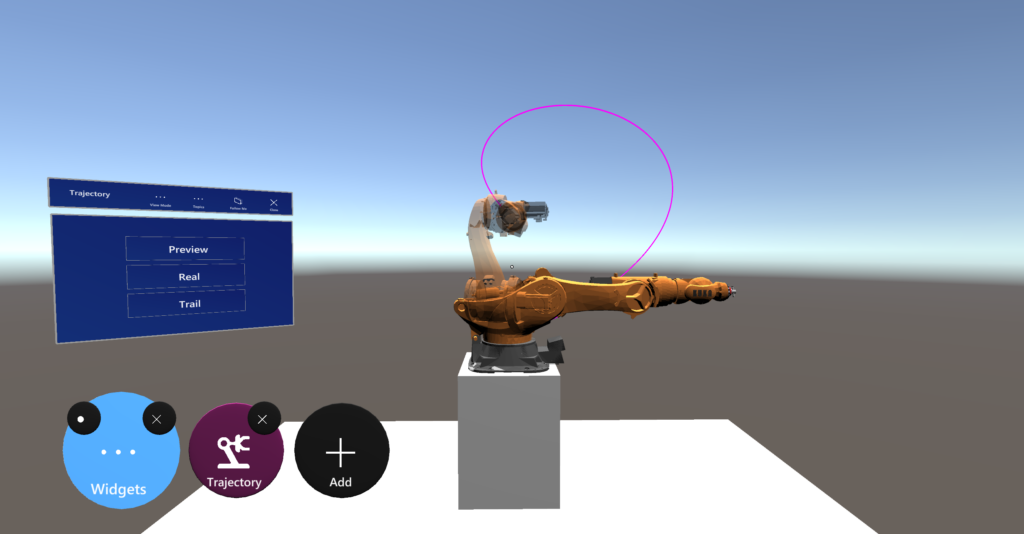
Mit dem Trajectory Widget besteht zudem die Möglichkeit, eine von ROS gesendete Trajektorie als Pfad, als halbtransparente Vorschau oder als Bewegung des virtuellen Roboters zu interpretieren. Die verschiedenen Bewegungen können mit dem Trajectory History Widget gespeichert und erneut als Vorschau wiedergegeben werden.
Architektur
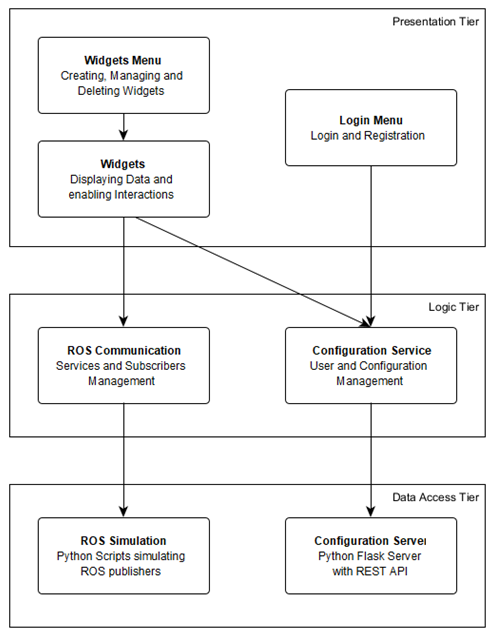
Unser System haben wir mit einer Drei-Schichten-Architektur strukturiert. Die einzelnen Schichten werden konzeptionell den Funktionalitäten (Darstellen, Verarbeiten und Verwalten/Speichern der Daten) zugeordnet. Unser Ziel ist, die Komplexität der Abhängigkeiten innerhalb unseres Systems zu reduzieren und somit eine geringere Kopplung bei gleichzeitig höherer Kohäsion der einzelnen Schichten zu erreichen. Dies hat Vorteile sowohl für das Verständnis als auch für die Wartung unseres Systems.
Die Architektur besteht aus den folgenden drei Schichten:
Die Präsentationsschicht stellt die oberste Ebene des Systems dar, welche für die Präsentation der Daten und mögliche Benutzereingaben verantwortlich ist. Hier befinden sich sowohl das Widget-Menü mit den Widgets als auch das Registrierungs- und Anmeldemenü.
Darunter liegt die Logikschicht, die Daten verarbeitet und für die Präsentationsschicht zur Verfügung stellt. Zum einen befindet sich hier die Kommunikation mit ROS, um dessen Service- und Subscriber-Schnittstellen zu verwalten, zum anderen ist der Konfigurationsservice der Logikschicht zugeordnet. Dieser registriert die Benutzer, meldet sie an und ab, und lädt die Konfigurationen (Position, Ansichtsmodus, ausgewählte Daten/Topics, usw.) beim Öffnen eines Widgets. Außerdem speichert der Konfigurationsservice beim Schließen neue Konfigurationen, um ein reibungsloses Arbeiten mit den Widgets zu ermöglichen.
Die unterste Ebene unseres Systems ist die Datenhaltungsschicht. Sie enthält unsere ROS-Simulation, und den Konfigurationsserver, welcher für das Speichern und Verwalten der Konfigurationsdaten von Benutzern und Widgets verantwortlich ist. Für die ROS-Simulation haben wir uns entschieden, da wir aufgrund des digitalen Semesters keinen Zugriff auf einen echten Roboter hatten.
Ausblick
In einem nächsten Schritt kann das jetzige Projekt aus Unity, der von uns genutzten Laufzeit- und Entwicklungsumgebung, auf die HoloLens übertragen werden. Dafür muss der virtuelle Roboter auf die Position des realen Roboters im Raum gelegt und die Bewegungen synchronisiert werden.
Team
Nik Julin Nowoczyn
Jonas Elia
Maximilian Hammerl
Fabio Tempelmann
Katharina Utzschneider
Betreuung: Alexander Poeppel
Leiter des Innovationslabors: Prof. Dr. Wolfgang Reif










{kind=link}